To motivate many of our later developments, we start with the simplest case of a rotation: a rotation about a fixed axis  through an angle
through an angle  . This example should be familiar to you from many different venues. To describe this rotation, we consider the action of this rotation on the set of fixed, orthonormal, right-handed basis vectors
. This example should be familiar to you from many different venues. To describe this rotation, we consider the action of this rotation on the set of fixed, orthonormal, right-handed basis vectors  . As depicted in Figure 1, we suppose that these vectors are transformed to the set
. As depicted in Figure 1, we suppose that these vectors are transformed to the set  by the rotation.
by the rotation.
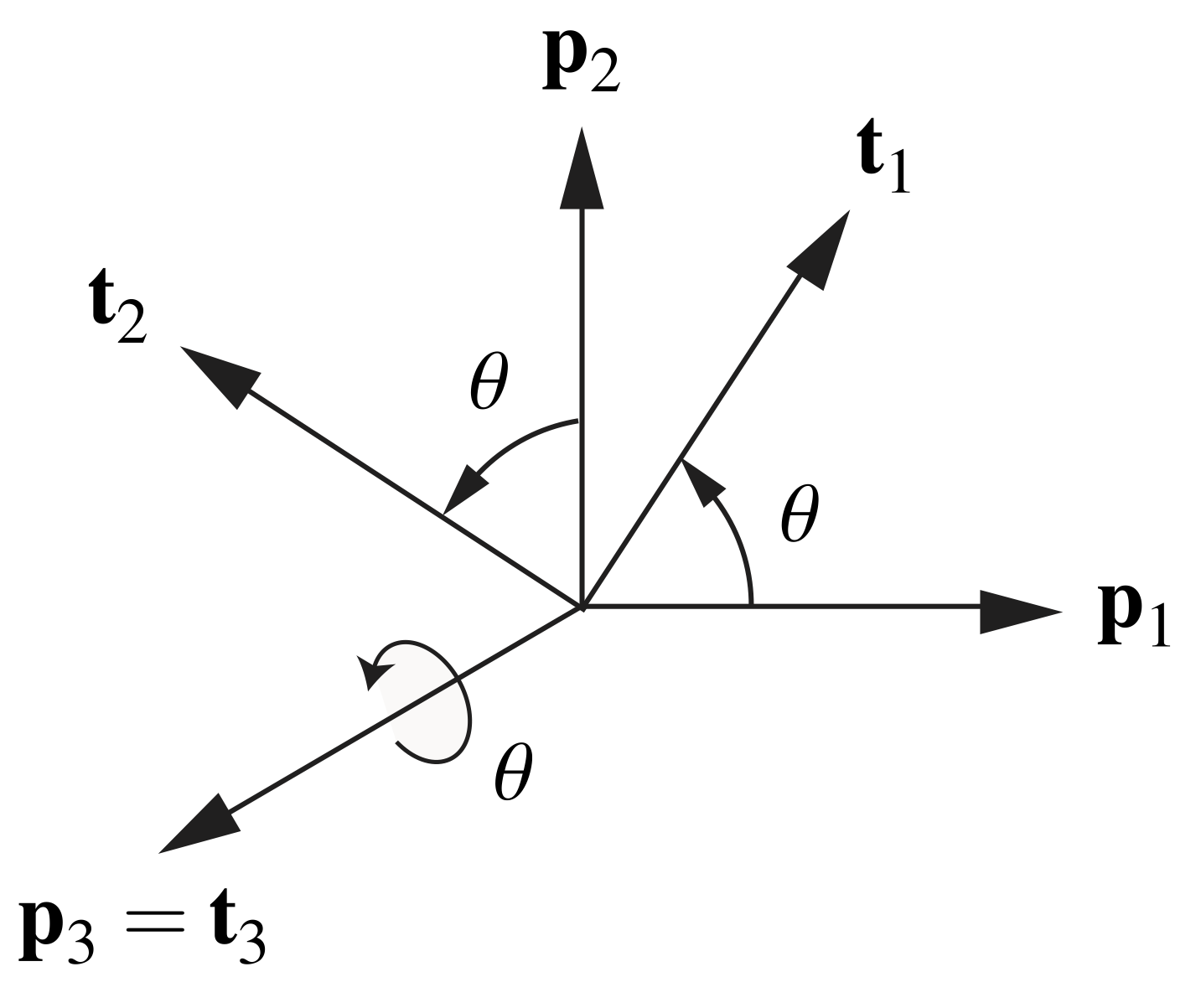
 into
into  by a rotation about
by a rotation about  through an angle
through an angle  .
.[toc]
A matrix representation of the rotation
Using a matrix notation, we can represent the transformation from the set of basis vectors to as
(1) ![\begin{equation*} \left[ \begin{array}{c} {\bf t}_1 \\ {\bf t}_2 \\ {\bf t}_3 \end{array} \right] = \underbrace{\left[ \begin{array}{c c c } \cos(\theta) & \sin(\theta) & 0 \\ - \sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1 \end{array} \right]}_{\mathsf{R}} \left[\begin{array}{c} {\bf p}_1 \\ {\bf p}_2 \\ {\bf p}_3 \end{array} \right] . \end{equation*}](https://rotations.berkeley.edu/wp-content/ql-cache/quicklatex.com-e9421e5e90d0e38c2a3cdfaa4fa8bf67_l3.png "Rendered by QuickLaTeX.com")
It is easy to see that the matrix  in (1) has a unit determinant, and its inverse is its transpose:
in (1) has a unit determinant, and its inverse is its transpose:  . That is, the matrix is proper-orthogonal. By differentiating (1) with respect to time, we find that
. That is, the matrix is proper-orthogonal. By differentiating (1) with respect to time, we find that
(2) ![\begin{equation*} \left[ \begin{array}{c} \dot{\bf t}_1 \\ \dot{\bf t}_2 \\ \dot{\bf t}_3 \end{array} \right] = \underbrace{ \dot{\theta} \left[ \begin{array}{c c c } - \sin(\theta) & \cos(\theta) & 0 \\ - \cos(\theta) & - \sin(\theta) & 0 \\ 0 & 0 & 0 \end{array} \right]}_{ \dot{\mathsf{R}} } \left[\begin{array}{c} {\bf p}_1 \\ {\bf p}_2 \\ {\bf p}_3 \end{array} \right]. \end{equation*}](https://rotations.berkeley.edu/wp-content/ql-cache/quicklatex.com-835fcd61aab8db4e4ec5ca18991d3dab_l3.png "Rendered by QuickLaTeX.com")
Using the fact that , we can easily replace 
 in (2) with
in (2) with  to obtain
to obtain
(3) ![\begin{eqnarray*} \left[ \begin{array}{c} \dot{\bf t}_1 \\ \dot{\bf t}_2 \\ \dot{\bf t}_3 \end{array} \right] \!\!\!\!\! &=& \!\!\!\!\! \underbrace{ \dot{\theta} \left[ \begin{array}{c c c } - \sin(\theta) & \cos(\theta) & 0 \\ - \cos(\theta) & - \sin(\theta) & 0 \\ 0 & 0 & 0 \end{array} \right] }_{ \dot{\mathsf{R}} } \underbrace{ \left[ \begin{array}{c c c } \cos(\theta) & - \sin(\theta) & 0 \\ \sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1 \end{array} \right] }_{ \mathsf{R}^T } \left[\begin{array}{c} {\bf t}_1 \\ {\bf t}_2 \\ {\bf t}_3 \end{array} \right] \hspace{1in} \scalebox{0.001}{\textrm{\textcolor{white}{.}}} \\ \\[0.05in] &=& \!\!\!\!\! \underbrace{\dot{\theta} \left[ \begin{array}{c c c } 0 & 1 & 0 \\ - 1 & 0 & 0 \\ 0 & 0 & 0 \end{array} \right]}_{\dot{\mathsf{R}}\mathsf{R}^T} \left[\begin{array}{c} {\bf t}_1 \\ {\bf t}_2 \\ {\bf t}_3 \end{array} \right]. \end{eqnarray*}](https://rotations.berkeley.edu/wp-content/ql-cache/quicklatex.com-ba36d370170de8679709b7dccfd8ddeb_l3.png "Rendered by QuickLaTeX.com")
Notice that this is equivalent to the familiar results  and
and  from cylindrical polar coordinates. It should also be clear from (3) that
from cylindrical polar coordinates. It should also be clear from (3) that  is a skew-symmetric matrix. A vector
is a skew-symmetric matrix. A vector  can be introduced that has the useful property that
can be introduced that has the useful property that
(4) 
You should notice how the vector can be inferred from the components of .
A tensor representation of the rotation
It is convenient to use a tensor notation1 to describe the rotation we have been discussing. In particular, we can write (1) in the form
(5) 
where  is the tensor
is the tensor
(6) 
It can be shown that this representation of the rotation is equivalent to (1). Furthermore, because
(7) 
we can express the tensor entirely in terms of the axis of rotation  and the angle of rotation
and the angle of rotation  :
:
(8) 
or, equivalently,
(9) 
As we shall see later, these equivalent representations naturally lead to the general form of a tensor that represents a rotation about an arbitrary axis through an arbitrary angle of rotation. As with the matrix representation of this simple rotation, the rotation tensor is a proper-orthogonal tensor because it has a determinant of one and its inverse is its transpose:  and
and  . Differentiating (5), we find that
. Differentiating (5), we find that
(10) 
where we have used the fact that  are constant vectors. Some straightforward computations involving (6) reveal that
are constant vectors. Some straightforward computations involving (6) reveal that
(11) 
and
(12) ![\begin{eqnarray*} \dot{\bf R} {\bf R}^T \!\!\!\!\! &=& \!\!\!\!\! \dot{\theta} \left( - {\bf p}_1\otimes{\bf p}_2 + {\bf p}_2\otimes{\bf p}_1\right) \\[0.10in] &=& \!\!\!\!\! \dot{\theta} \left( - {\bf t}_1\otimes{\bf t}_2 + {\bf t}_2\otimes{\bf t}_1\right). \end{eqnarray*}](https://rotations.berkeley.edu/wp-content/ql-cache/quicklatex.com-f275b5244513f41cff25a2f531e56609_l3.png "Rendered by QuickLaTeX.com")
With the help of these results, we conclude from (10) that
(13) 
As expected, this result is in agreement with (4). Expression (13) implies that the vector  is the axial vector of the skew-symmetric tensor
is the axial vector of the skew-symmetric tensor  .
.
Notes
- For those unfamiliar with tensor notation, a review of tensors is available in the background section on linear algebra.