Here, we explicitly show how, with knowledge of the strains for a directed curve and a particular parameterization of a rotation tensor, one may determine the orientation of the curve’s associated directors at each material point by solving a system of ordinary differential equations.
Contents
Equations of motion
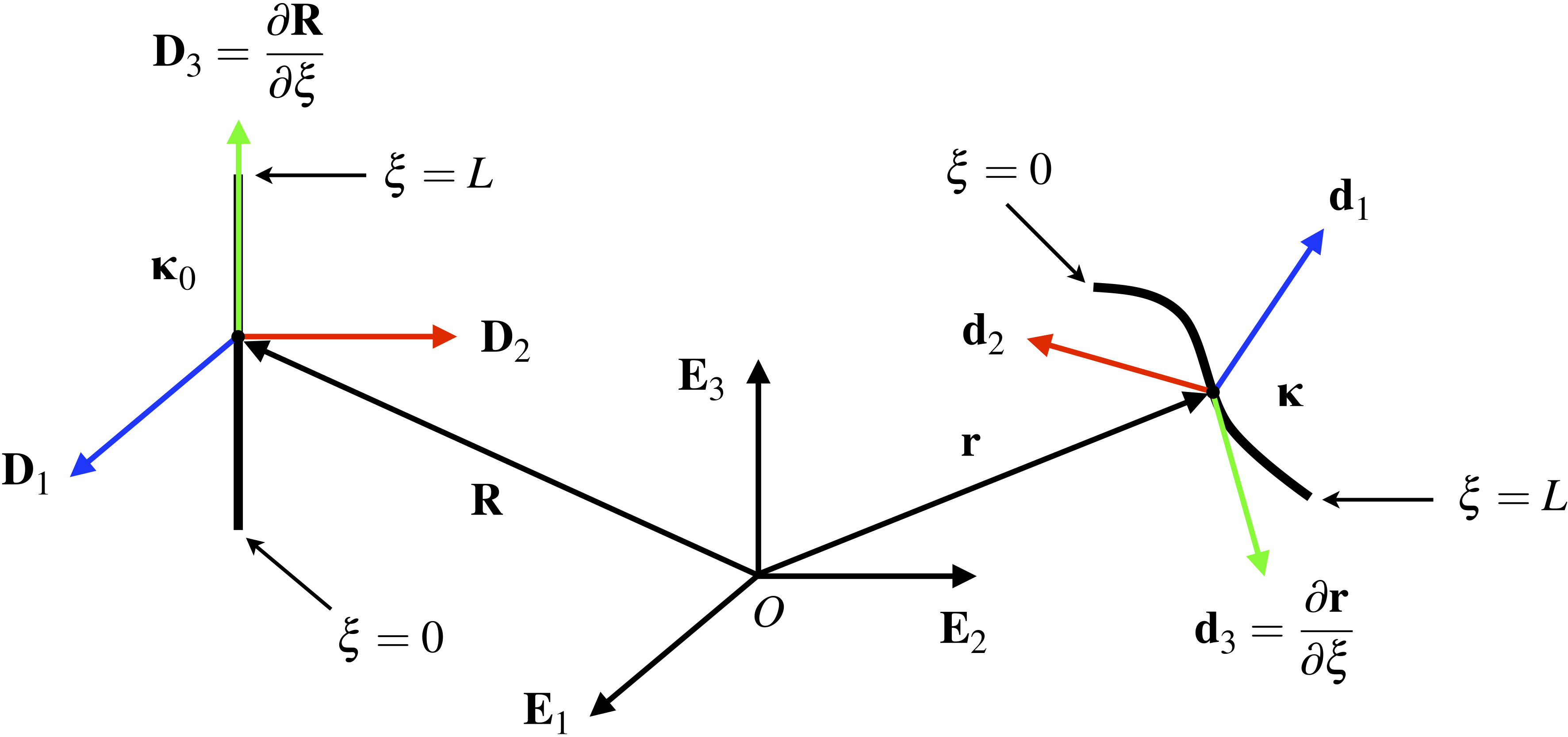
Referring to Figure 1, consider an inextensible material curve of length  with convected coordinate
with convected coordinate  . We define a right-handed orthonormal triad
. We define a right-handed orthonormal triad  at each material point in the curve’s reference configuration
at each material point in the curve’s reference configuration  . Similarly, we have at each in the curve’s current configuration
. Similarly, we have at each in the curve’s current configuration  an associated triad
an associated triad  , where the vectors
, where the vectors  and
and  are known as directors. Note that the absolute position of a material point on the curve in the reference and current configurations is denoted by
are known as directors. Note that the absolute position of a material point on the curve in the reference and current configurations is denoted by  and
and  , respectively, which are expressed in terms of the space-fixed basis
, respectively, which are expressed in terms of the space-fixed basis  .
.
 and
and  , respectively.
, respectively.Recall that according to Kirchhoff’s rod theory, the triads and at each for the material curve are related such that 
 , where
, where  ,
,  , and
, and  is a rotation tensor. As illustrated in Figure 1, we assume the material curve is undeformed (i.e., it is straight with no pre-twist) in the reference configuration such that
is a rotation tensor. As illustrated in Figure 1, we assume the material curve is undeformed (i.e., it is straight with no pre-twist) in the reference configuration such that  .
.
Following Love [1], we use a 3-2-3 set of Euler angles  ,
,  , and
, and  to parameterize the rotation tensor , and therefore
to parameterize the rotation tensor , and therefore  and
and  are related via the matrix-vector expression
are related via the matrix-vector expression
(1) ![\begin{equation*}\left[ \begin{array}{c c c}\mathbf{d}_{1} \\\mathbf{d}_{2} \\\mathbf{d}_{3}\end{array} \right] =\left[ \begin{array}{c c c }\cos(\phi) & \sin(\phi) & 0 \\- \sin(\phi) & \cos(\phi) & 0 \\0 & 0 & 1\end{array} \right]\left[ \begin{array}{c c c }\cos(\theta) & 0 & -\sin(\theta) \\0 & 1 & 0 \\\sin(\theta) & 0 & \cos(\theta)\end{array} \right]\left[ \begin{array}{c c c }\cos(\psi) & \sin(\psi) & 0 \\- \sin(\psi) & \cos(\psi) & 0 \\0 & 0 & 1\end{array} \right]\left[ \begin{array}{c c c}\mathbf{E}_{1} \\\mathbf{E}_{2} \\\mathbf{E}_{3}\end{array} \right] . \hspace{1in} \scalebox{0.001}{\textrm{\textcolor{white}{.}}}\end{equation*}](https://rotations.berkeley.edu/wp-content/ql-cache/quicklatex.com-c7f1ca0105747292d885e0f4c88d9aae_l3.png "Rendered by QuickLaTeX.com")
Kirchhoff’s constraints imply that there exists an axial vector
(2) 
associated with the skew-symmetric tensor  , with
, with  for
for  . Consequently, (2) yields
. Consequently, (2) yields
(3) 
where  denote strain measures for the material curve;
denote strain measures for the material curve;  and
and  correspond to bending of the curve, while
correspond to bending of the curve, while  is associated with torsion. By extracting the components of expression (3), we obtain a system of ordinary differential equations that governs the orientation of the triad at every material point on the directed curve. These differential equations may be expressed in the first-order form
is associated with torsion. By extracting the components of expression (3), we obtain a system of ordinary differential equations that governs the orientation of the triad at every material point on the directed curve. These differential equations may be expressed in the first-order form  for numerical integration in MATLAB, where the prime denotes differentiation with respect to the convected coordinate . If we define the state vector
for numerical integration in MATLAB, where the prime denotes differentiation with respect to the convected coordinate . If we define the state vector ![\mathsf{y} = \left [ \psi, \ \theta, \ \phi \right ]^{T}](https://rotations.berkeley.edu/wp-content/ql-cache/quicklatex.com-80742e4d29d2967a2a7205cada3ee91f_l3.png "Rendered by QuickLaTeX.com") , then
, then
(4) ![\begin{eqnarray*}&& \mathsf{M}(\xi, \, \mathsf{y}) = \left[ \begin{array}{c c c}-\sin(\theta) \cos(\phi) & \sin(\phi) & 0 \\\sin(\theta) \sin(\phi) & \cos(\phi) & 0 \\\cos(\theta) & 0 & 1\end{array} \right],\\\\\\&& \textrm{\textcolor{white}{---}} \mathsf{f}(\xi, \, \mathsf{y}) =\left[ \begin{array}{c}\nu_{1}(\xi) \\\nu_{2}(\xi) \\\nu_{3}(\xi)\end{array} \right].\end{eqnarray*}](https://rotations.berkeley.edu/wp-content/ql-cache/quicklatex.com-b8cf30b58fcb799e23e3bc9a75e057b9_l3.png "Rendered by QuickLaTeX.com")
Thus, by providing the strains  and the initial orientation of the directed curve, we may determine the evolution of the Euler angles, and hence the orientation of , along the curve. Lastly, because , the shape of the material curve,
and the initial orientation of the directed curve, we may determine the evolution of the Euler angles, and hence the orientation of , along the curve. Lastly, because , the shape of the material curve,  , is obtained as follows:
, is obtained as follows:
(5) 
Simulation and animation
For the simulation results that follow, the material curve is  m long and begins at the origin:
m long and begins at the origin:  . The initial orientation was chosen such that
. The initial orientation was chosen such that  ,
,  , and
, and  in order to avoid a singularity in the 3-2-3 set of Euler angles.
in order to avoid a singularity in the 3-2-3 set of Euler angles.
First, as a check of our numerical simulation, suppose we leave the material curve undeformed, i.e., the strains  . In this case, we expect the triad to remain in the same orientation at each material point along the curve. This behavior is verified when we animate the corresponding results from numerical integration; a sample animation is provided in Figure 2. In this and subsequent animations, the directors and are drawn in blue and red, respectively, while the vector
. In this case, we expect the triad to remain in the same orientation at each material point along the curve. This behavior is verified when we animate the corresponding results from numerical integration; a sample animation is provided in Figure 2. In this and subsequent animations, the directors and are drawn in blue and red, respectively, while the vector  is drawn in green, as shown in Figure 1.
is drawn in green, as shown in Figure 1.
 along an undeformed directed curve:
along an undeformed directed curve: 
 .
.Next, we may cause the material curve to be in pure bending by prescribing either  ,
,  , and
, and  , or
, or  ,
,  , and . The animation in Figure 3 demonstrates the variation in along the curve for the case when
, and . The animation in Figure 3 demonstrates the variation in along the curve for the case when  , , and .
, , and .
along a directed curve subject to pure bending:  ,
,  , and
, and  .
.Pure torsion of the material curve is possible if we set , , and  . For example, when we prescribe , , and
. For example, when we prescribe , , and  , it is clear from the corresponding animation in Figure 4 that the spinning behavior of results from the curve having been twisted.
, it is clear from the corresponding animation in Figure 4 that the spinning behavior of results from the curve having been twisted.
along a directed curve subject to pure torsion:  , , and
, , and  .
.Lastly, we may deform the material curve in more complicated ways by combining bending and torsion, and by specifying strains that vary along the curve. Consider, for example, the material curve depicted in Figure 5 that is subject to both constant bending and torsion:  , , and
, , and  . Consequently, the variation in along the curve is more elaborate than the cases of pure bending and pure torsion.
. Consequently, the variation in along the curve is more elaborate than the cases of pure bending and pure torsion.
along a directed curve subject to constant bending and torsion:  , , and
, , and  .
.Alternatively, suppose the strains vary along the material curve according to, say,  ,
,  , and
, and  . As shown in Figure 6, the orientation of at each material point varies in a more complicated manner than for the simple bending or torsion cases.
. As shown in Figure 6, the orientation of at each material point varies in a more complicated manner than for the simple bending or torsion cases.
along a directed curve with variable strains:  ,
,  , and
, and  .
.Downloads
The animations in Figures 2–6 were generated using the following MATLAB code: