Here, we explore the dynamics of a thin disk rolling without slipping over a rough horizontal surface. Analysis of the thin disk’s motion has a long history, dating back to the works of Appell [1], Chaplygin [2], and Korteweg [3] in the late 19th century.
[toc]
Equations of motion
Consider a thin axisymmetric disk with mass  and radius
and radius  that rolls without slipping over a stationary and rough horizontal plane, as illustrated in Figure 1. We locate the disk’s mass center
that rolls without slipping over a stationary and rough horizontal plane, as illustrated in Figure 1. We locate the disk’s mass center  using a set of Cartesian coordinates,
using a set of Cartesian coordinates, 
 , where
, where  is the space-fixed basis, and thus the disk’s linear momentum
is the space-fixed basis, and thus the disk’s linear momentum  .
.
 . The basis
. The basis  , which is attached to the disk but not spinning with it, more conveniently describes the location of the disk’s instantaneous point of contact
, which is attached to the disk but not spinning with it, more conveniently describes the location of the disk’s instantaneous point of contact  with the horizontal surface. The bases
with the horizontal surface. The bases 
 and
and  are related by a spin
are related by a spin  about the
about the  direction.
direction.
The orientation of the disk is parameterized by set of Euler angles:  ,
,  , and
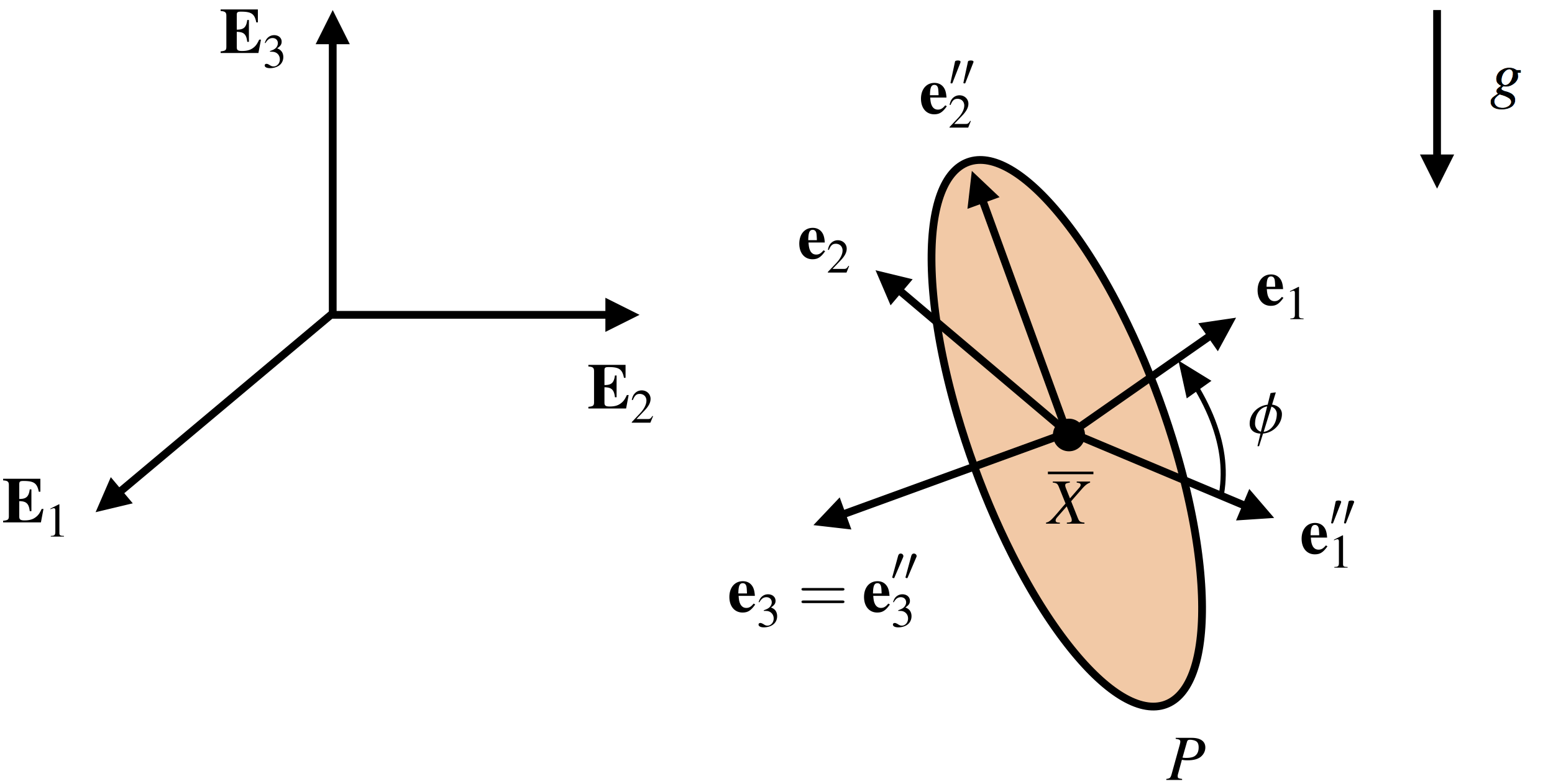
, and  . We assume the disk’s reference configuration is such that the disk lays flat in the horizontal plane, and therefore the disk’s spin axis corresponds to the corotational basis vector
. We assume the disk’s reference configuration is such that the disk lays flat in the horizontal plane, and therefore the disk’s spin axis corresponds to the corotational basis vector  . The disk’s instantaneous point of contact
. The disk’s instantaneous point of contact  with the surface is located relative to the center of mass according to
with the surface is located relative to the center of mass according to  , where the basis vector
, where the basis vector  is attached to the disk but not spinning with it, i.e., the basis
is attached to the disk but not spinning with it, i.e., the basis  and the corotational basis
and the corotational basis  are separated by a spin about the
are separated by a spin about the  direction.
direction.
Because the disk is axisymmetric, its principal moments of inertia  and
and  . The angular momentum of the disk about its mass center is then
. The angular momentum of the disk about its mass center is then  , where
, where  denote the corotational components of the disk’s angular velocity. Using a 3-1-3 set of Euler angles,
denote the corotational components of the disk’s angular velocity. Using a 3-1-3 set of Euler angles,  are related to , , and and their rates of change as follows:
are related to , , and and their rates of change as follows:
(1) 
The disk is subject to three constraints arising from the fact that the instantaneous point of contact with the fixed horizontal surface must have zero velocity for the disk to roll without slipping:  . One of these constraints,
. One of these constraints,  (that is, the disk maintains contact with the surface), is integrable (i.e., holonomic), while the remaining two constraints,
(that is, the disk maintains contact with the surface), is integrable (i.e., holonomic), while the remaining two constraints,  and
and  , are non-integrable (or non-holonomic).
, are non-integrable (or non-holonomic).
We may obtain the disk’s equations of motion by applying a balance of linear momentum and a balance of angular momentum with respect to the disk’s mass center:  and
and  , respectively. The disk’s weight, the vertical reaction force exerted by the surface on the bottom of the disk, and the static friction force acting at the instantaneous contact point comprise the net force
, respectively. The disk’s weight, the vertical reaction force exerted by the surface on the bottom of the disk, and the static friction force acting at the instantaneous contact point comprise the net force  and contribute to the net moment
and contribute to the net moment  about the disk’s center of mass. The resulting equations of motion from applying the balance laws coupled with the non-integrable constraints form a set of differential equations that describe the disk’s orientation and the lateral translation of its mass center over time. We may conveniently express this system of equations in the first-order form
about the disk’s center of mass. The resulting equations of motion from applying the balance laws coupled with the non-integrable constraints form a set of differential equations that describe the disk’s orientation and the lateral translation of its mass center over time. We may conveniently express this system of equations in the first-order form  suitable for numerical integration in MATLAB. Taking the state vector
suitable for numerical integration in MATLAB. Taking the state vector ![\mathsf{y} = \left [ \dot{\psi}, \ \dot{\theta}, \ \dot{\phi} , \ \psi, \ \theta, \ \phi, \ x_{1}, \ x_{2} \right ]^{T}](https://rotations.berkeley.edu/wp-content/ql-cache/quicklatex.com-2e7d6f6aa15594f89b529943b4b2549a_l3.png "Rendered by QuickLaTeX.com") , we have
, we have
(2) ![\begin{eqnarray*}&& \mathsf{M}(t, \, \mathsf{y}) = \left[ \begin{array}{c c c c c c c c}\lambda_{t} \sin(\theta) & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\0 & \lambda_{t} + m r^2 & 0 & 0 & 0 & 0 & 0 & 0 \\(\lambda_{a} + m r^2) \cos(\theta) & 0 & \lambda_{a} + m r^2 & 0 & 0 & 0 & 0 & 0 \\0 & 0 & 0 & 1 & 0 & 0 & 0 & 0 \\0 & 0 & 0 & 0 & 1 & 0 & 0 & 0 \\0 & 0 & 0 & 0 & 0 & 1 & 0 & 0 \\0 & 0 & 0 & 0 & 0 & 0 & 1 & 0 \\0 & 0 & 0 & 0 & 0 & 0 & 0 & 1\end{array} \right],\\\\\\&& \mathsf{f}(t, \, \mathsf{y}) =\left[ \begin{array}{c}(\lambda_{a} - 2 \lambda_{t} ) \dot{\psi} \dot{\theta} \cos(\theta) + \lambda_{a} \dot{\theta} \dot{\phi} \\(\lambda_{t} - \lambda_{a} - m r^2) \dot{\psi}^2 \sin(\theta) \cos(\theta) - (\lambda_{a} + m r^2) \dot{\psi} \dot{\phi} \sin(\theta) - m g r \cos(\theta) \\(\lambda_{a} + 2 m r^2) \dot{\psi} \dot{\theta} \sin(\theta) \\\dot{\psi} \\\dot{\theta} \\\dot{\phi} \\-r \dot{\psi} \cos(\psi) \cos(\theta) + r \dot{\theta} \sin(\psi) \sin(\theta) - r \dot{\phi} \cos(\psi) \\-r \dot{\psi} \sin(\psi) \cos(\theta) - r \dot{\theta} \cos(\psi) \sin(\theta) - r \dot{\phi} \sin(\psi)\end{array} \right]. \hspace{1in} \scalebox{0.001}{\textrm{\textcolor{white}{.}}}\end{eqnarray*}](https://rotations.berkeley.edu/wp-content/ql-cache/quicklatex.com-0df5c68843d242eea2606b3c77663420_l3.png "Rendered by QuickLaTeX.com")
Simulation and animation
Assuming the horizontal surface is sufficiently rough to prevent slipping, a typical simulated rolling motion of the disk is animated in Figure 2, where we trace out the path of the instantaneous point of contact with the surface to further highlight the disk’s behavior.
The disk is able to execute a steady motion in which it rolls at a constant rate in a circular path. This motion is possible if the disk’s precession rate  , nutation angle
, nutation angle  , and spin rate
, and spin rate  are constant and satisfy the condition
are constant and satisfy the condition
(3) 
A sample steady motion of the disk is shown in Figure 3.
Because the instantaneous point of contact with the horizontal surface has zero velocity, the static friction force acting on the disk does no work, and thus the disk’s total mechanical energy  is conserved:
is conserved:
(4) 
Surprisingly, the rolling disk has associated with it two other conserved quantities that were discovered in the late 19th century by Appell [1], Chaplygin [2], and Korteweg [3] (see [4, 5, 6, 7]). However, their physical interpretation is still an open question.
Finally, we may extend our analysis of the rolling disk to very simply demonstrate the counterintuitive nature of making a turn on a bicycle or motorcycle: to turn right, for example, one must push forward on the right handlebar. Suppose the disk now includes a very light axle that passes through the disk’s center along its spin axis. We can cause the disk to initiate a right turn by exerting a forward force  on the right side of the axle at a distance
on the right side of the axle at a distance  from the disk’s center. An animation of this simulated behavior is provided in Figure 4. It is important to note that the force is applied throughout the duration of the simulation, causing the disk to accelerate and travel in an outward spiraling path.
from the disk’s center. An animation of this simulated behavior is provided in Figure 4. It is important to note that the force is applied throughout the duration of the simulation, causing the disk to accelerate and travel in an outward spiraling path.
Downloads
The animations in Figures 2, 3, and 4 were generated using the following MATLAB code:
| Main script: | Solve the rolling disk’s equations of motion |
| Supporting files: | Derive the rolling disk’s equations of motion ** Animate the rolling disk’s motion |
| ** Run this code first to obtain the symbolic equations of motion called by the main script. (The Symbolic Math Toolbox is required.) This code needs to be run only once, before the first use of the main script. |
References
- Appell, P., Sur l’intégration des équations du mouvement d’un corps pesant de révolution roulant par une arête circulaire sur un plan horizontal; cas particulier du cerceau, Rendiconti del Circolo Matematico di Palermo 14(1) 1-6 (1900).
- Chaplygin, S. A., On a motion of a heavy body of revolution on a horizontal plane, Regular and Chaotic Dynamics 7(2) 119-130 (2002). English translation of the Russian paper published in 1897.
- Korteweg, D. J., Extrait d’une lettre à M. Appell, Rendiconti del Circolo Matematico di Palermo 14(1) 7-8 (1900).
- Borisov, A. V., and Mamaev, I. S., Rolling of a rigid body on plane and sphere. Hierarchy of dynamics, Regular and Chaotic Dynamics 7(2) 177-200 (2002).
- Cushman, R., Hermans, J., and Kemppainen, D., The rolling disc, in: H. W. Broer, S. A. van Gils, I. Hoveijn, F. Takens (eds.), Nonlinear Dynamical Systems and Chaos, Progress in Nonlinear Differential Equations and Their Applications, Vol. 19, pp. 21-60, Birkhäuser, Basel (1996).
- Karapetyan, A .V., and Kuleshov, A. S., Steady motions of nonholonomic systems, Regular and Chaotic Dynamics 7(1) 81-117 (2002).
- O’Reilly, O. M., The dynamics of rolling disks and sliding disks, Nonlinear Dynamics 10(3) 287-305 (1996).